
Themen und Projekte
In der Übersicht finden Sie die Themen & Projekte, mit denen wir uns befassen. Sie betreffen verschiedene Bereiche der maritimen Branche. Wir haben sie einzeln aufgeführt und nach Schwerpunktthemen geclustert.

Schiffbauindustrie-Emissionen
Rechtsgutachten untersucht aktuelle Vorschriften zu Stoffemissionen, Schallemissionen und Abfallentsorgung für Schiffbaubetriebe.
Hintergrund – Normentwurf DIN 2304-2 zum Kleben im Schiffbau
Zusammen mit Branchenexpert*innen und dem Deutschen Institut für Normung erarbeitet das DMZ eine DIN-Norm zum Einsatz von Klebtechnologien im Schiffbau.

Arbeitgebermarketing 4.0: Digitale Candidate Journey in der maritimen Branche
Praxisnahe Studie zur Nachwuchs- und Fachkräftegewinnung über digitale Kanäle mithilfe von Candidate-Persona-Steckbriefen

Feel Maritime – Talente für den nachhaltigen Wandel
Informationen über die Vielfalt an Berufen in der maritimen Branche
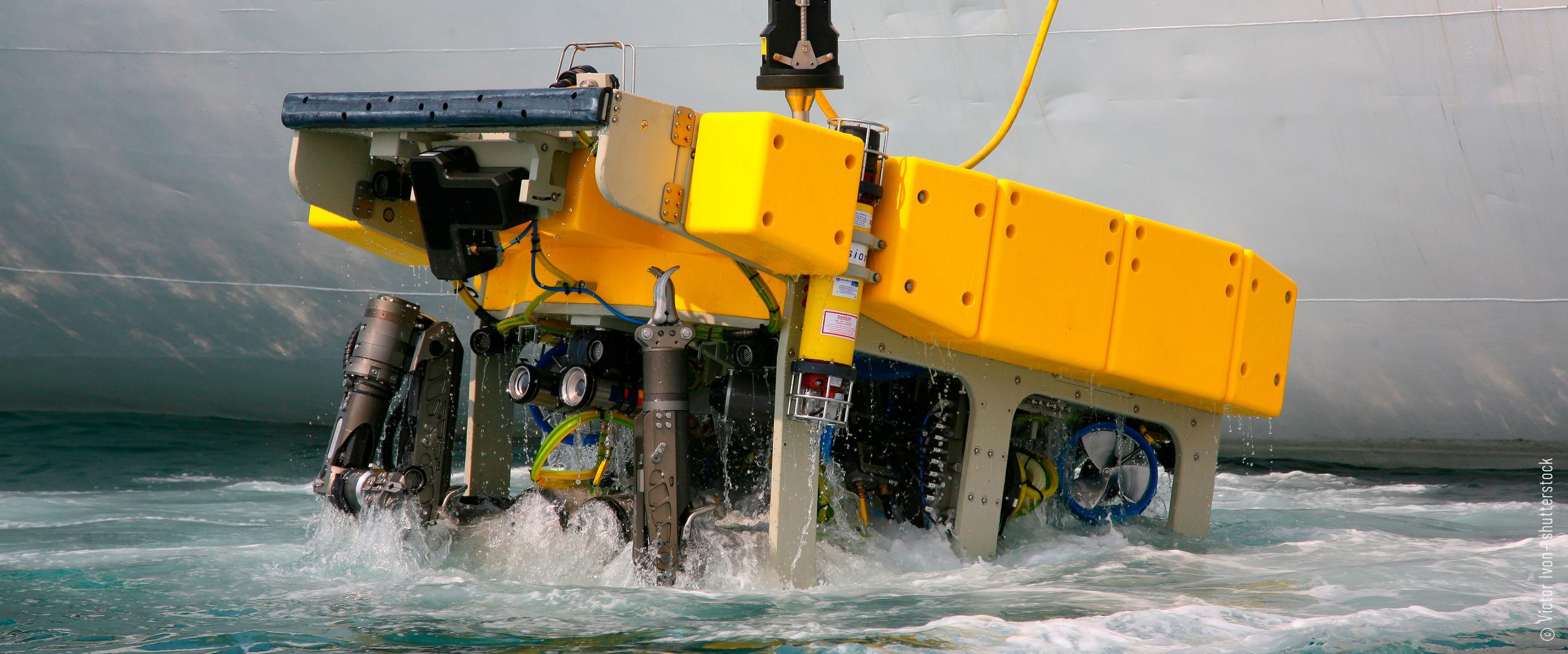
Entwicklung des Marktes für Autonome Maritime Systeme (AMS)
Branchenumfrage ergibt Stimmungsbilder der maritimen Teilsegmente in Deutschland und Europa und identifiziert Unsicherheiten und Hürden
Nachhaltiges Schiffsrecycling in Deutschland – Eine Studie zum Marktumfeld
Eine Vielzahl der beim Abwracken eines Schiffes anfallenden Produkte ist recycelbar und kann die Kreislaufwirtschaft stärken.

Hintergrund – Europa maritim: Chancen und Möglichkeiten europäischer Fördermittel
Klimaneutrale Technologien erfordern umfassende Investitionen. Vor allem für klein- und mittelständische maritime Unternehmen, stehen vielfältige Förder- und Finanzierungsmittel zur Verfügung.

Nachwuchssicherung
Studie und Whitepaper über Erwartungen und Wünsche des Nachwuchses an die maritime Branche

Maritime Wasserstoffanwender – Studie zum Wasserstoffbedarf der maritimen Branche Deutschlands
Maritime Branche kann Energiewende gestalten und Standort Deutschland stärken.

Hintergrund – Schiffstypen
Schiff ist nicht gleich Schiff. Sie unterscheiden sich nach Form, Größe, Einsatzort und Aufgabe. Was oder wen sollen sie wohin transportieren? Wie müssen sie für die jeweilige Aufgabe ausgestattet sein.

Maritime Transformation: Wegbereiterin für die Zukunft – Bericht
Dekarbonisierung, Digitalisierung und Fachkräftemangel - auf der Konferenz diskutierte die Branche in Berlin Lösungen und stellte die Chancen des Wandels in den Vordergrund.
Potenzialanalyse zur Relevanz digitaler Kommunikation
Juni 2023: Studie zu digitaler Kommunikation als Wettbewerbsfaktor für die Unternehmen der maritimen Branche in Deutschland
Förderprogramme der EU
Wie wird Horizont Europa in der deutschen maritimen Branche angenommen? Erste Erkenntnisse aus der Förderperiode 2021-2022

Energiewende in der globalen Transportlogistik – Bericht
Unterschiede und Gemeinsamkeiten aus Sicht mehrerer Sektoren - eine Konferenz auf der transport logistic 2023

Maritime Research Forum 2023 – Interviews
Interviews mit Expert*innen zu Hafen & Hinterland, Detektion, Schiffsauslegung/-optimierung, zur Marinen Biologie und zu Operativem Schiffsbetrieb

Evaluierung des Erhebungsverfahrens zur Einfuhrumsatzsteuer
Einführung eines Erhebungsverfahrens nach Verrechnungslogik in Deutschland vorantreiben
Maritime Research Forum 2023 – Bericht
Wissenschaft trifft Wirtschaft - das Maritime Research Forum fand in diesem Jahr in Kooperation mit der Hochschule Bremen statt. Im Mittelpunkt standen Fragen der Nachhaltigkeit.

Skills for Future
Um wettbewerbsfähig zu bleiben, braucht die maritime Branche ausreichend und passend qualifiziertes Personal.

Insight Maritime – Adopt a Ship
Gemeinsam mit maritimen Akteur*innen und weiterführenden Schulen wollen wir jungen Menschen Einblicke in die vielfältigen Berufsfelder geben und die maritime Branche erlebbar machen.

Umwelt-Rabattsystem bei Befahrungsabgaben
Studie soll Vorschläge zur Einführung einer ökologischen Komponente bei den Befahrungsabgaben auf dem Nord-Ostsee-Kanal (NOK) entwickeln.
Richtlinienentwicklung Kleben im Schiffbau
Seit Oktober 2020 leitet das Deutsche Maritime Zentrum einen Richtlinienausschuss „Kleben im Schiffbau“, der einen einheitlichen Standard für den Einsatz von Klebetechnologien im Schiffbau erarbeitet.

Kraftstoff-Analyse in der Schifffahrt nach Schiffssegmenten
Energieträger der Zukunft. Von fossilen zu regenerativen Energieträgern. Erste Gesamtübersicht der für die Schifffahrt verfügbaren Brennstoffe und Energieträger.

Hervorragende akademische maritime Lehre
Das Deutsche Maritime Zentrum schreibt Wettbewerb aus. Der Wettbewerb wendet sich an Studentinnen und Studenten der akademischen maritimen Studiengänge.

Hintergrund – Bunkervorschriften in deutschen Seehäfen
Das Deutsche Maritime Zentrum hat im Sommer 2020 eine Studie in Auftrag gegeben, in der ein „Leitfaden zur einheitlichen Regelung des Bunkerns von alternativen Kraftstoffen in deutschen Seehäfen“ entwickelt wurde.
Studie zu Anwendungsfällen von Autonomen Maritimen Systemen
Beitrag zur Erhebung der Grundlagen für eine strategische Koordination zum internationalen Wissens- und Technologietransfer.

Wasserstoffbetriebene Binnenschiffe
Neue Studie befasst sich mit dem Europäischen Standard der technischen Vorschriften für Binnenschiffe (ES-TRIN) und entwirft Vorschlag für eine Vorschriftenerweiterung für den Betrieb von Fahrzeugen mit Brennstoffen
Hintergrund – Future Fuels
Welche Rolle werden alternative Kraftstoffe in der Schifffahrt spielen? Laut Pariser Klimaabkommen von 2015 soll die weltweite Erderwärmung auf deutlich unter zwei Grad Celsius begrenzt werden.

Green Shipping, Maritime Souveränität und Know-how-Erhalt
Studie zu Finanzierungsinstrumenten in der maritimen Branche abgeschlossen.

Social Media für die Maritime Branche
Kommunikation in den sozialen Medien ist soziale Interaktion, deren Erfolg von Authentizität und Nahbarkeit abhängt. Wir wollen die maritimen Akteure vernetzen und bei einem zielgerichteten Einsatz der sozialen Medien unterstützen.
Wasserstoff-Studie für die maritime Branche
Die Rolle der maritimen Wirtschaft bei der Etablierung einer deutschen Wasserstoffwirtschaft.
EU-Förderung für maritime Forschung und Entwicklung in Deutschland
Im Rahmen des europäischen Forschungsrahmenprogramms Horizont 2020 haben die maritimen Teilbranchen in den Jahren 2014 - 2020 Fördermittel für vielfältige Projekte im gesamten Bundesgebiet akquiriert.
Zero-Emission Waterborne Transport
Europäische Technologien für eine emissionsfreie Schifffahrt. Das Deutsche Maritime Zentrum ist Mitglied bei Waterborne.
Europäische Förderprogramme
Informieren – Mitgestalten- Koordinieren. Die deutsche maritime Branche befindet sich in einem Transformationsprozess.

Bunker Guidance für alternative Kraftstoffe in deutschen Seehäfen
Leitfaden zur einheitlichen Regelung des Bunkerns von alternativen Kraftstoffen in deutschen Seehäfen veröffentlicht.
Offshore-Testzentrum Meerestechnik
Studie zur Markt- und Potenzialanalyse fertiggestellt. Die Ergebnisse kommen der gesamten deutschen maritimen Branche zugute.
Förderung der Modernisierung von Küsten- und Binnenschiffen
Studie zur Entwicklung von Vorschlägen zur zukünftigen Förderung einer nachhaltigen Modernisierung von Küsten- und Binnenschiffen abgeschlossen.
Klebetechnologien für den Schiffbau
Studie „Überblick über Entwicklung und Anwendung von Klebeverbindungen in der Schiffsfertigung“ abgeschlossen - sie betrachtet die Anwendung der Klebetechnik im Schiffbau, Bootsbau, Binnenschiffbau wie auch in der Offshore-Industrie.
Maritime Research Forum 2019 – Bericht
Wissenschaft trifft Wirtschaft war das Motto des zweiten Maritime Research Forum. Das Forum, das in Kooperation mit der Helmut-Schmidt-Universität stattfand, stand unter dem Titel: „Zukünftige Kraftstoffe, Energie- und Antriebssysteme“.
Maritime Research Forum 2019 – Interviews
Interviews mit Expert*innen zu E-Fuels in Großmotoren, Windkraft- und Wasserstoffanwendungen, Energiespeicher / Brennstoffzellen und Synthetische Kraftstoffe

Gutachten zum Wasserrecht
Eine leistungsstarke und verfügbare Infrastruktur ist das Rückgrat der maritimen Wirtschaft. Bei allen Ausbaumaßnahmen für die maritime Infrastruktur kommt dem Wasserrecht wesentliche Bedeutung zu.